遇到问题,先用已知的知识和成果,给出最好的方案。再去进一步探索现有方案的优点与不足,了解算法的本质。进而朝着你期望的方案不断去探索新的好的方案而努力
目录
问题
| 项目 | 详述 |
|---|---|
| 图库大小 | 200W+ |
| 目标 | 通过拍照的图片进行检索,根据相似度列出搜索结果 |
框架
LIRE is a Java library that provides a simple way to retrieve images and photos based on color and texture characteristics. LIRE creates a Lucene index of image features for content based image retrieval (
CBIR) using local and global state-of-the-art methods. Easy to use methods for searching the index and result browsing are provided. Best of all: it’s all open source.
CEDD全局算子
在1.0版本APP中,主要使用的算子就是CEDD算子,其原理与效果如下
图像检索:CEDD(Color and Edge Directivity Descriptor)算法
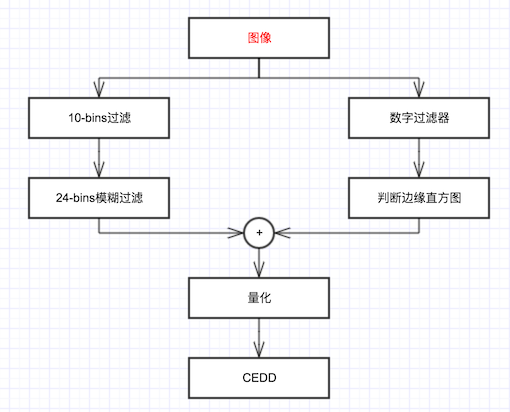
CEDD的英文全称是Color and Edge Directivity Descriptor,即颜色和边缘方向特征描述符。它结合了图像的颜色和纹理信息,生成一个(24*6)位的直方图。这个特征提取方法可以分为两个子模块系统,提取颜色信息的是颜色模块,提取纹理信息的是纹理模块。CEDD直方图信息由六个区域组成,也就是纹理模块,六个区域就是提取出的6维向量直方图,然后在这些纹理信息的每一维中再加入颜色模块提取出的24维颜色信息,这样就可以将颜色和纹理有效结合起来,最终得出6*24=144维的直方图信息。
直方图中各维信息的含义分别是:(0)无边缘信息,(1)无方向的边缘信息,(2)水平方向的边缘信息,(3)垂直方向的边缘信息,(4) 45度方向的边缘信息,(5) 135度方向的边缘信息。
10-bins直方图信息值的含义如下:(0)黒色(Black),(1)灰色(Gray),(2)白色(White),(3)红色(Red), (4)橙色(Orange),(5)黄色(Yellow),(6)绿色(Green),(7)青色(Cyan),(8)蓝色(Blue),(9)品红色(Magenta)。
24-bins模糊过滤器就是将10-bins模糊过滤器输出的每种色区再分为3个H值区域,输入一个10维向量和S、V通道值,输出的是一个24维向量。它输出的每一维所代表的信息分别是:(0)黑色(Black),(1)灰色(Grey),(2)白色(White),(3)暗红色(Dark Red),(4)红色(Red),(5)浅红(Light Red),(6)暗橙色(DarkOrange),(7)橙色(Orange),(8)浅橙色(Light Orange),(9)暗黄色(Dark Yellow),(10)黄色(Yellow), (11)浅黄色(LightYellow),(12)深绿色(Dark Green),(13)绿色(Green),(14)浅绿色(Light Green),(15)暗青色(Dark Cyan),(16)青色(Cyan),(17)浅青色(Light Cyan),(18)深蓝色(Dark Blue),(19)蓝色(Blue),(20)淡蓝色(LightBlue),(21)暗品红色(DarkMagenta),(22)品红色(Magenta),(23)浅品红色(Light Magenta)。
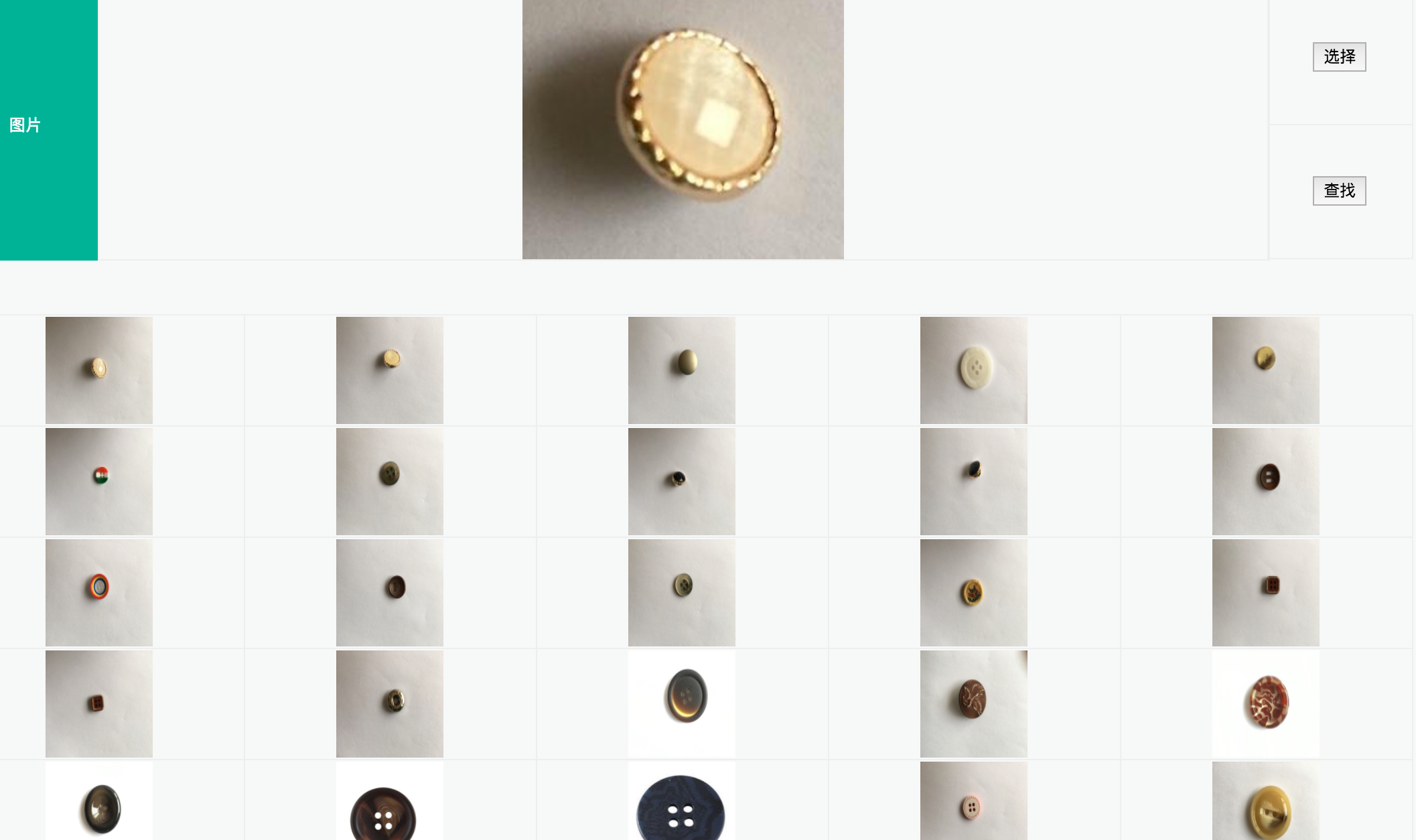
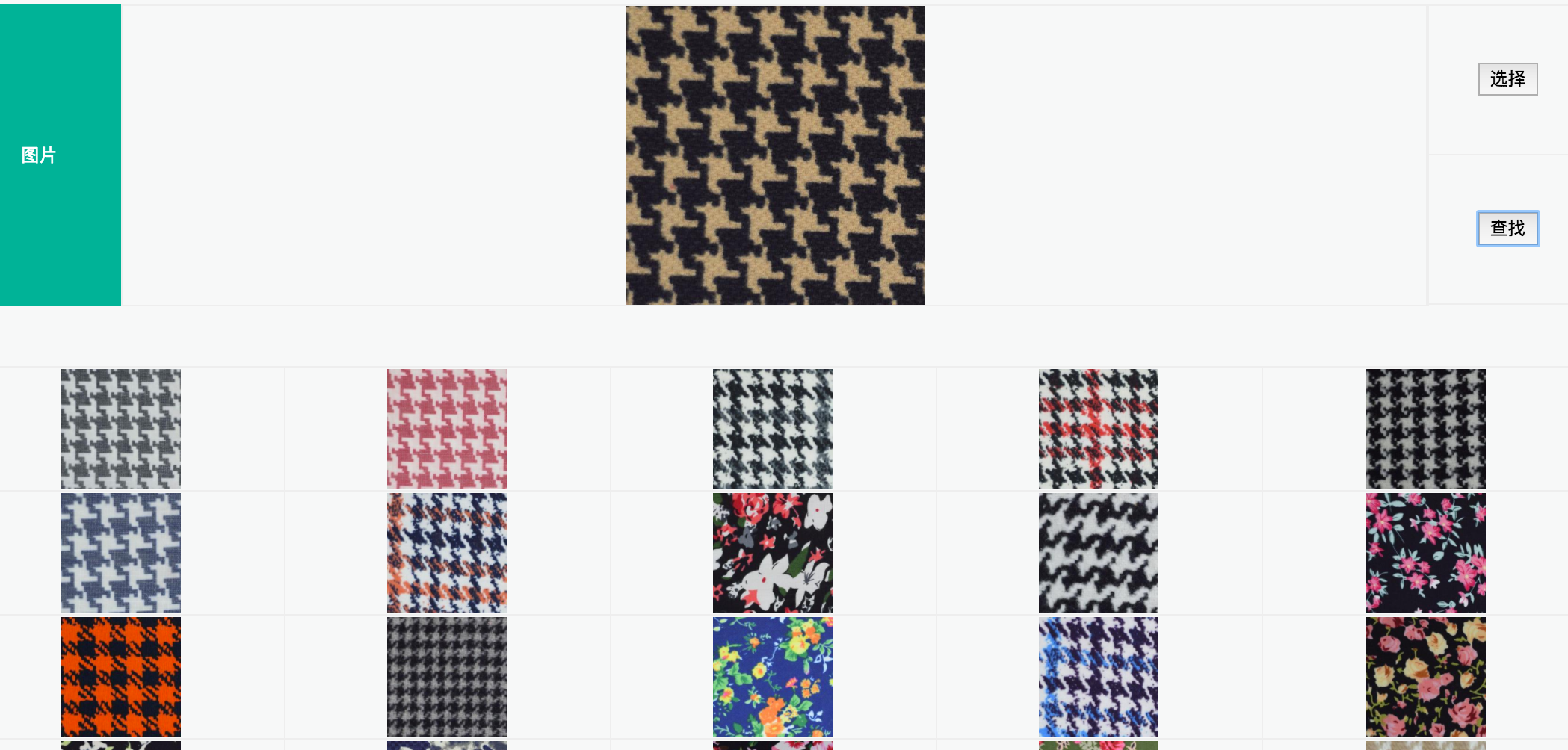
搜索效果:

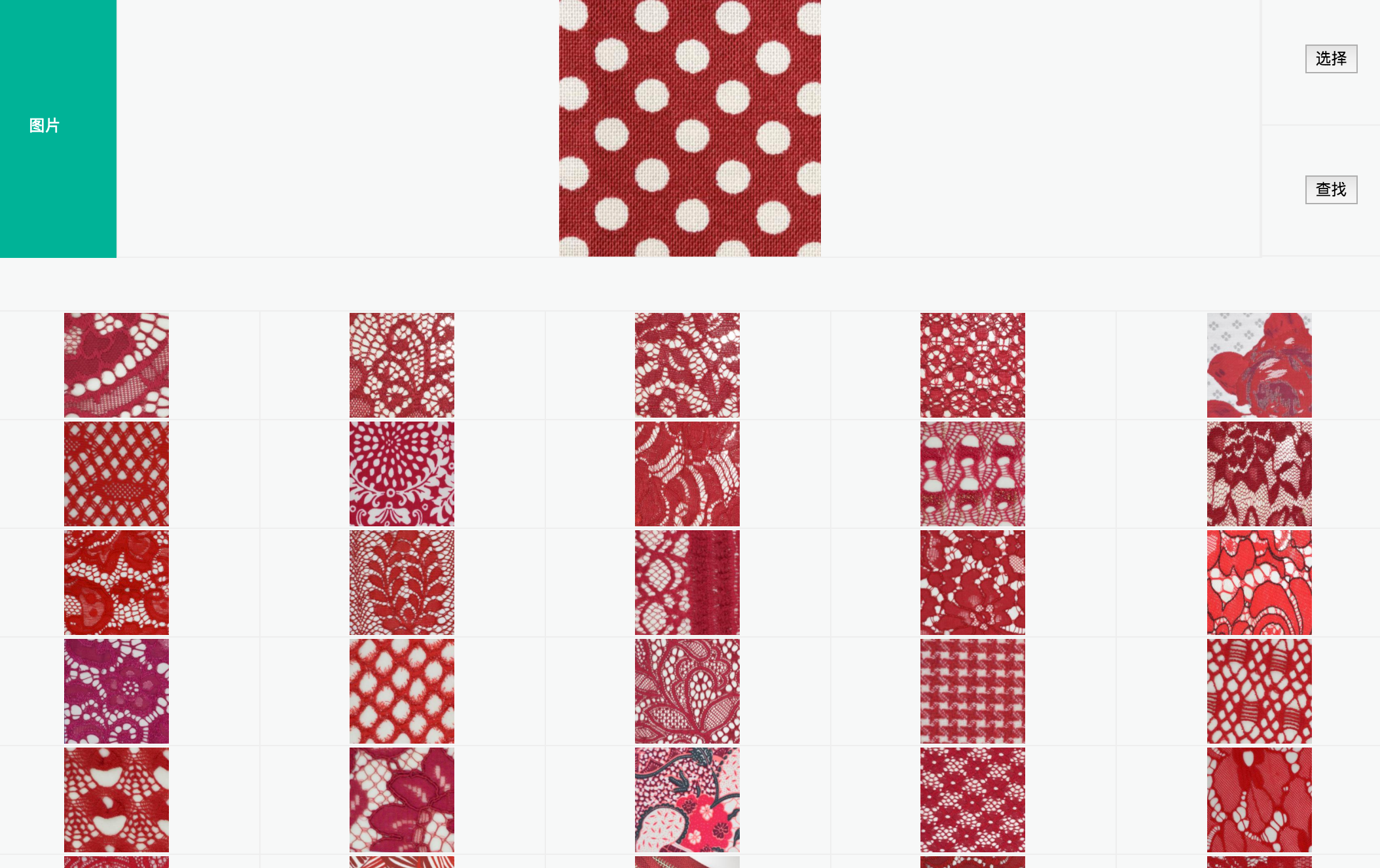

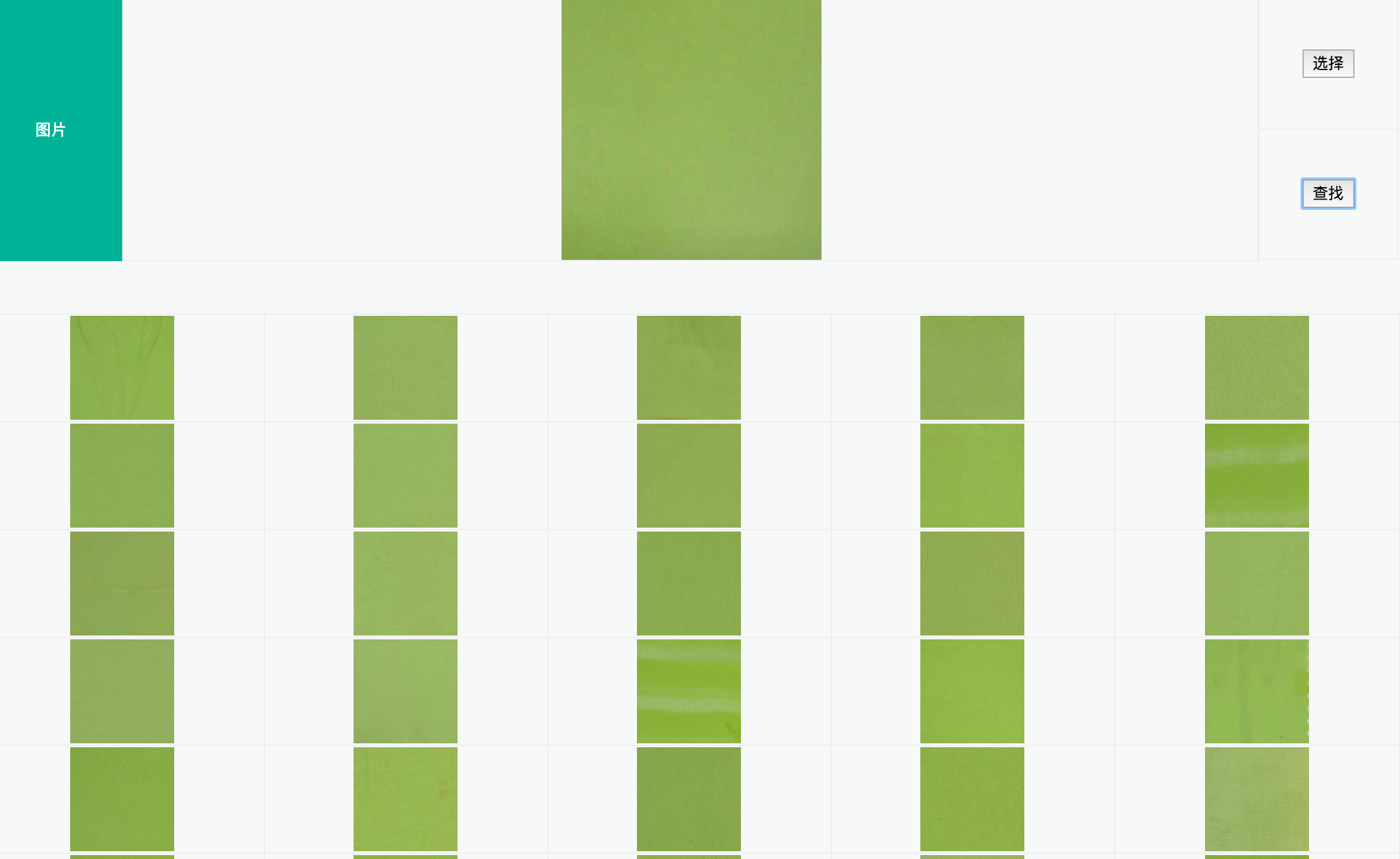
结论: 色彩效果很不错,但是结构纹理不能保证,聚类效果差
探索其他的方法
色彩算法
SIFT局部算子
SIFT(Scale-invariant feature transform)是一种检测局部特征的算法,该算法通过求一幅图中的特征点(interest points,or corner points)及其有关scale 和 orientation 的描述子得到特征并进行图像特征点匹配,获得了良好效果,详细解析如下:
算法描述
SIFT特征不只具有尺度不变性,即使改变旋转角度,图像亮度或拍摄视角,仍然能够得到好的检测效果。整个算法分为以下几个部分:
- 构造尺度空间:DoG尺度空间
- 检测DoG尺度空间极值点
- 去除不好的特征点
- 给特征点赋值一个128维的方向参数。每个关键点都包含三个信息:位置、尺度和方向。
- 关键点描述子的生成
具体可以去这篇博文看一下: 图像特征— —SIFT特征
SIFT算法的特点:
-
SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
-
独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
-
多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
-
高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
-
可扩展性,可以很方便的与其他形式的特征向量进行联合。
SIFT算法可以解决的问题:
目标的自身状态、场景所处的环境和成像器材的成像特性等因素影响图像配准/目标识别跟踪的性能。而SIFT算法在一定程度上可解决:
-
目标的旋转、缩放、平移(RST)
-
图像仿射/投影变换(视点viewpoint)
-
光照影响(illumination)
-
目标遮挡(occlusion)
-
杂物场景(clutter)
-
噪声
SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
SIFT在图像的不变特征提取方面拥有无与伦比的优势,但并不完美,仍然存在:
-
相对来说实时性还不够高。
-
有时特征点较少。
-
对边缘光滑的目标无法准确提取特征点。
等缺点,如下图所示,对模糊的图像和边缘平滑的图像,检测出的特征点过少。
SIFT算法调整
图片size
sift算法应用
效果
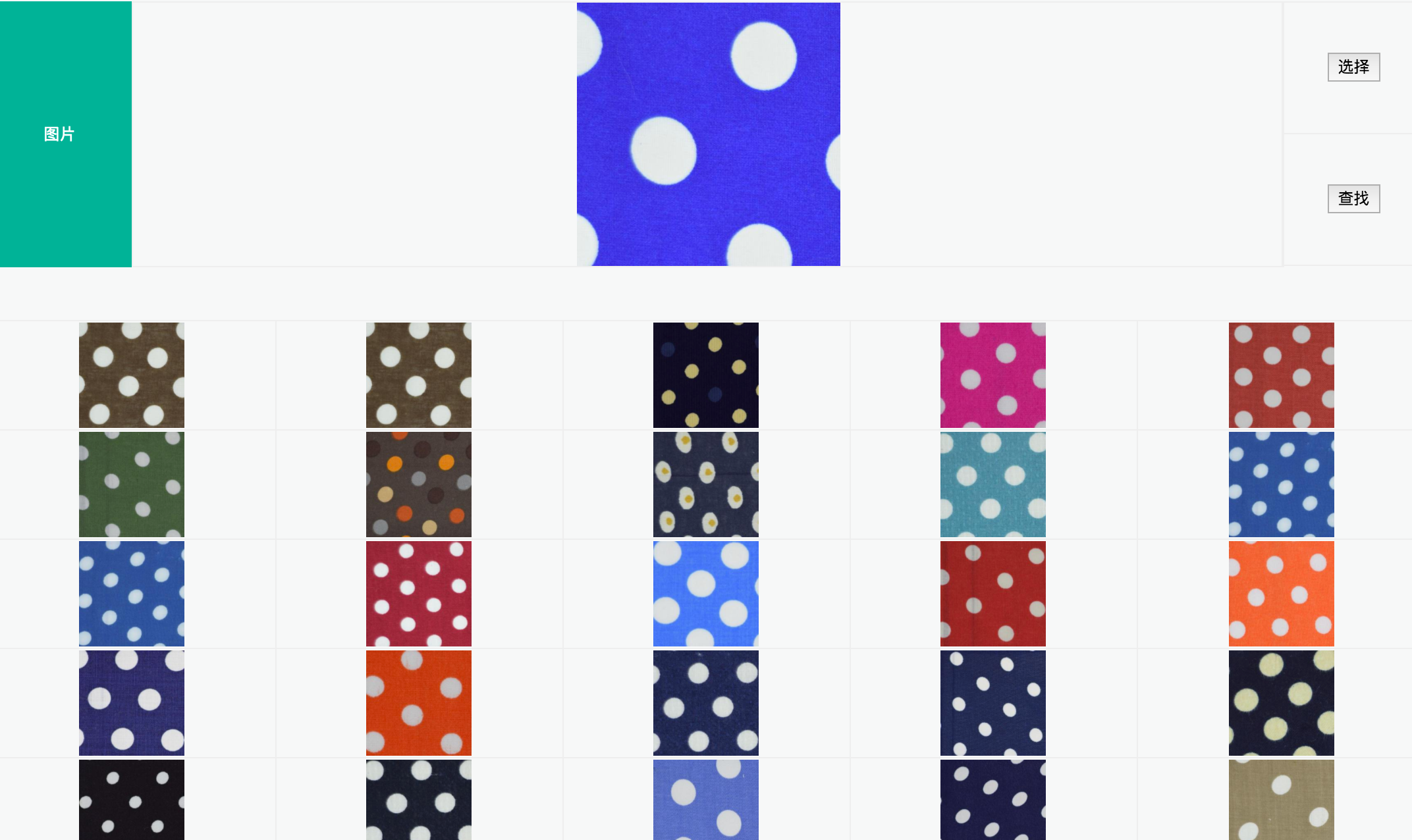

但是面临真实的拍照环境,结果却没有那么理想



改进BOW的SIZE
由512->1024 并重建码表

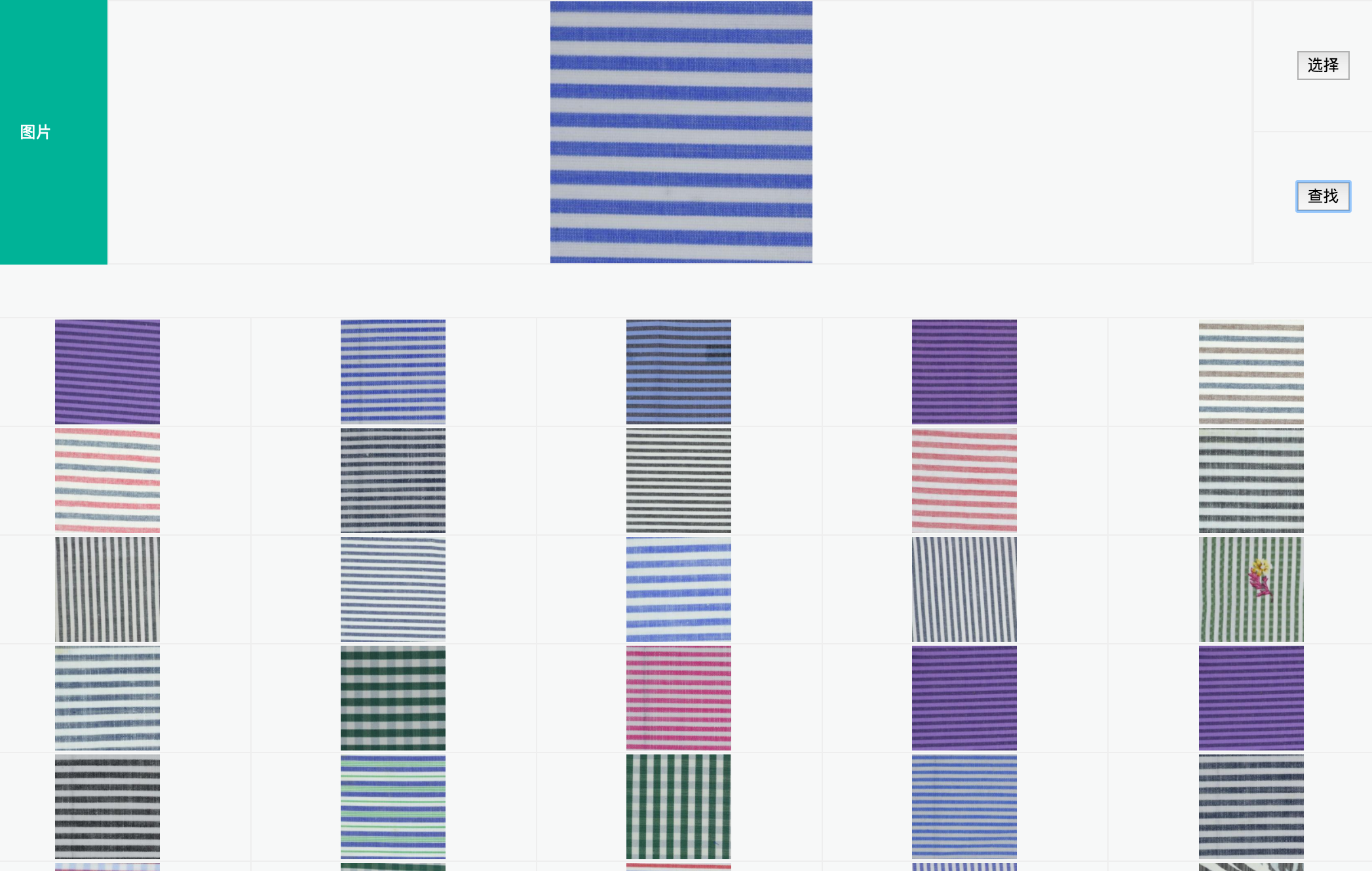
改进条纹
SIFT::SIFT(int nfeatures=0, int nOctaveLayers=3, double contrastThreshold=0.04, double edgeThreshold=
10, double sigma=1.6)
在sift算法中有几个参数:
nfeatures:特征点数目(算法对检测出的特征点排名,返回最好的nfeatures个特征点)。
nOctaveLayers:金字塔中每组的层数(算法中会自己计算这个值,后面会介绍)。
contrastThreshold:过滤掉较差的特征点的对阈值。contrastThreshold越大,返回的特征点越少。
edgeThreshold:过滤掉边缘效应的阈值。edgeThreshold越大,特征点越多(被多滤掉的越少)。
sigma:金字塔第0层图像高斯滤波系数,也就是σ。
edgeThreshold调整
采用默认值-10

50


200

1024+50(edge)

1024+200(edge)

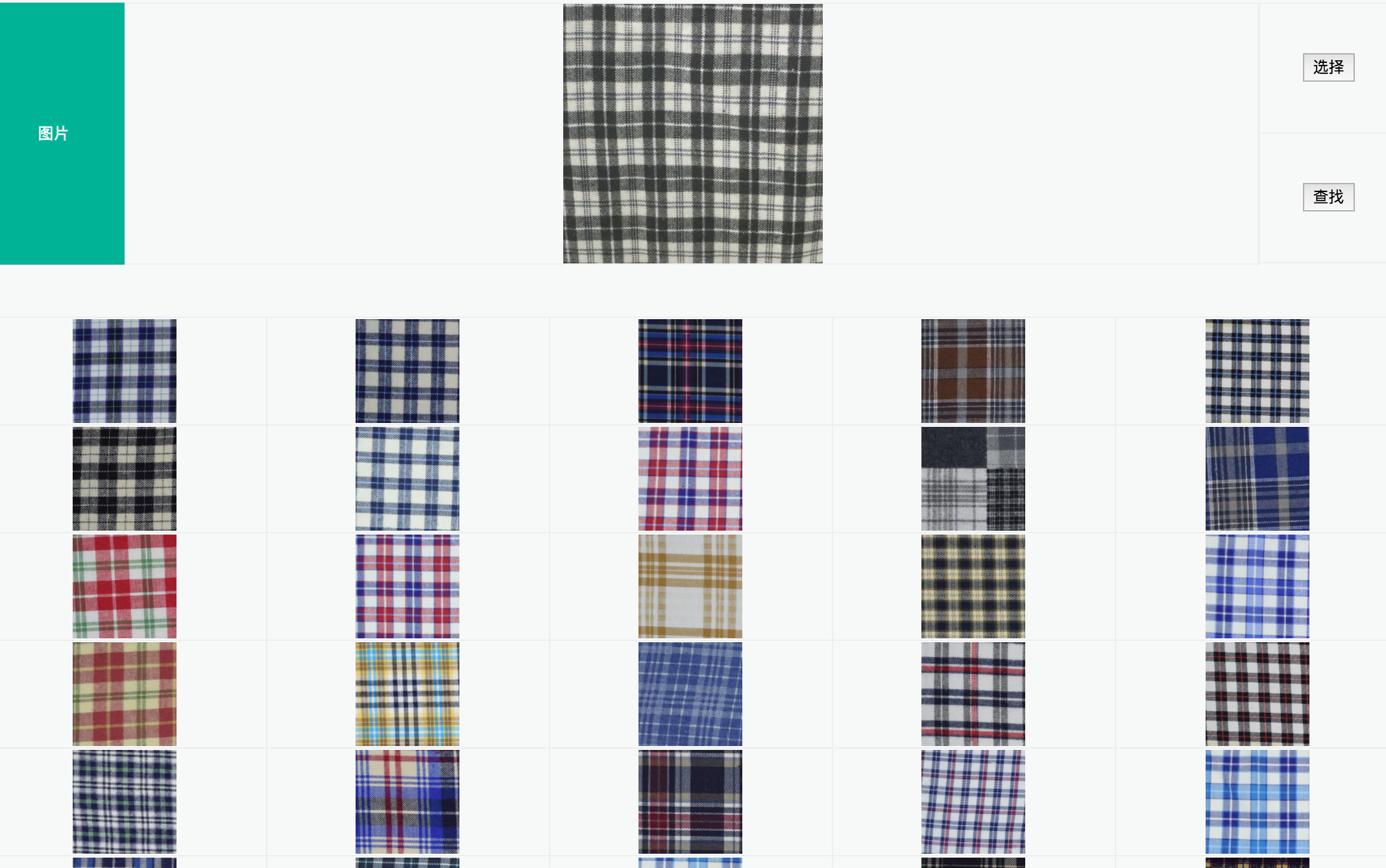
最终效果展示






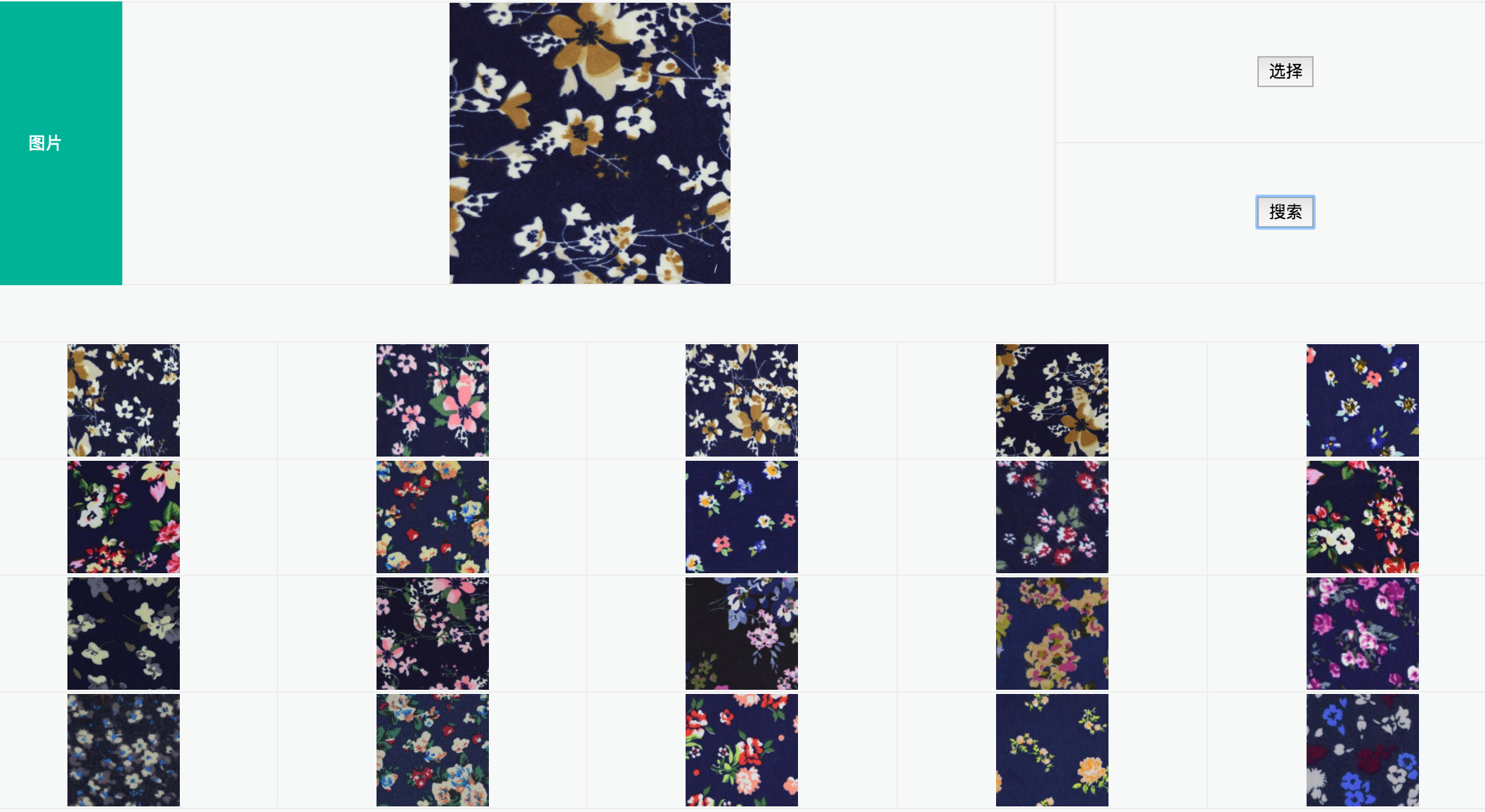
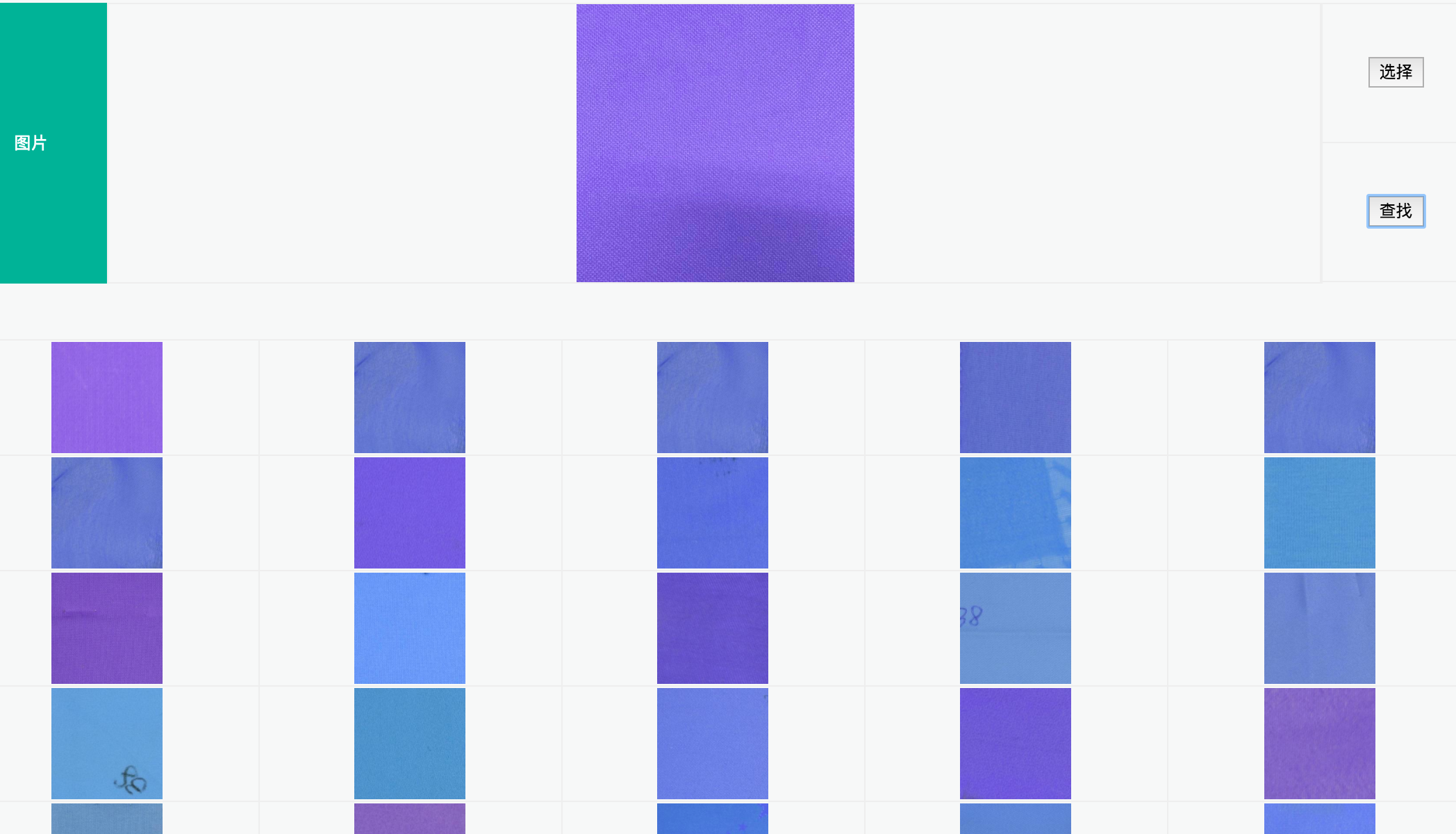
纯色效果
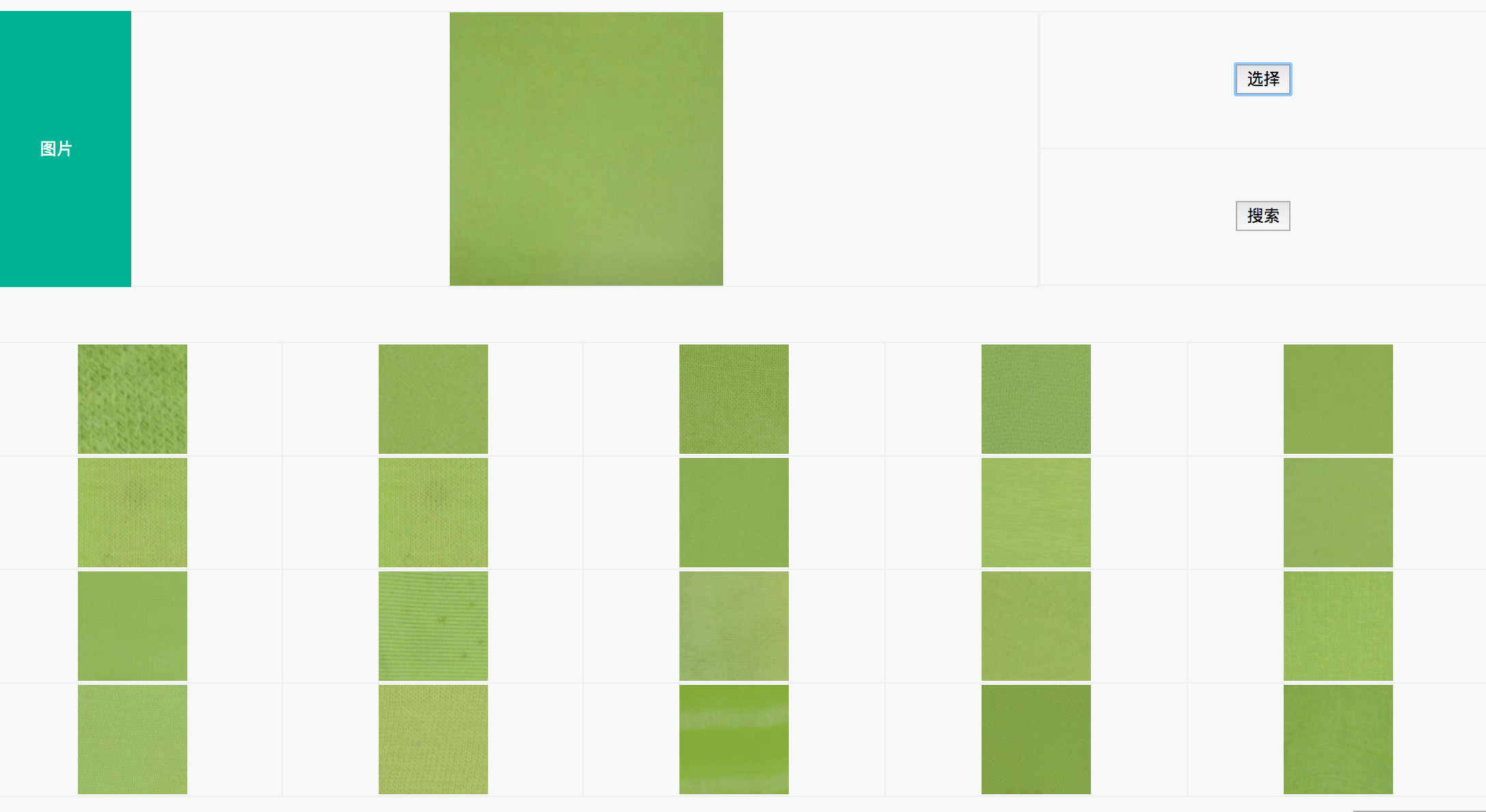
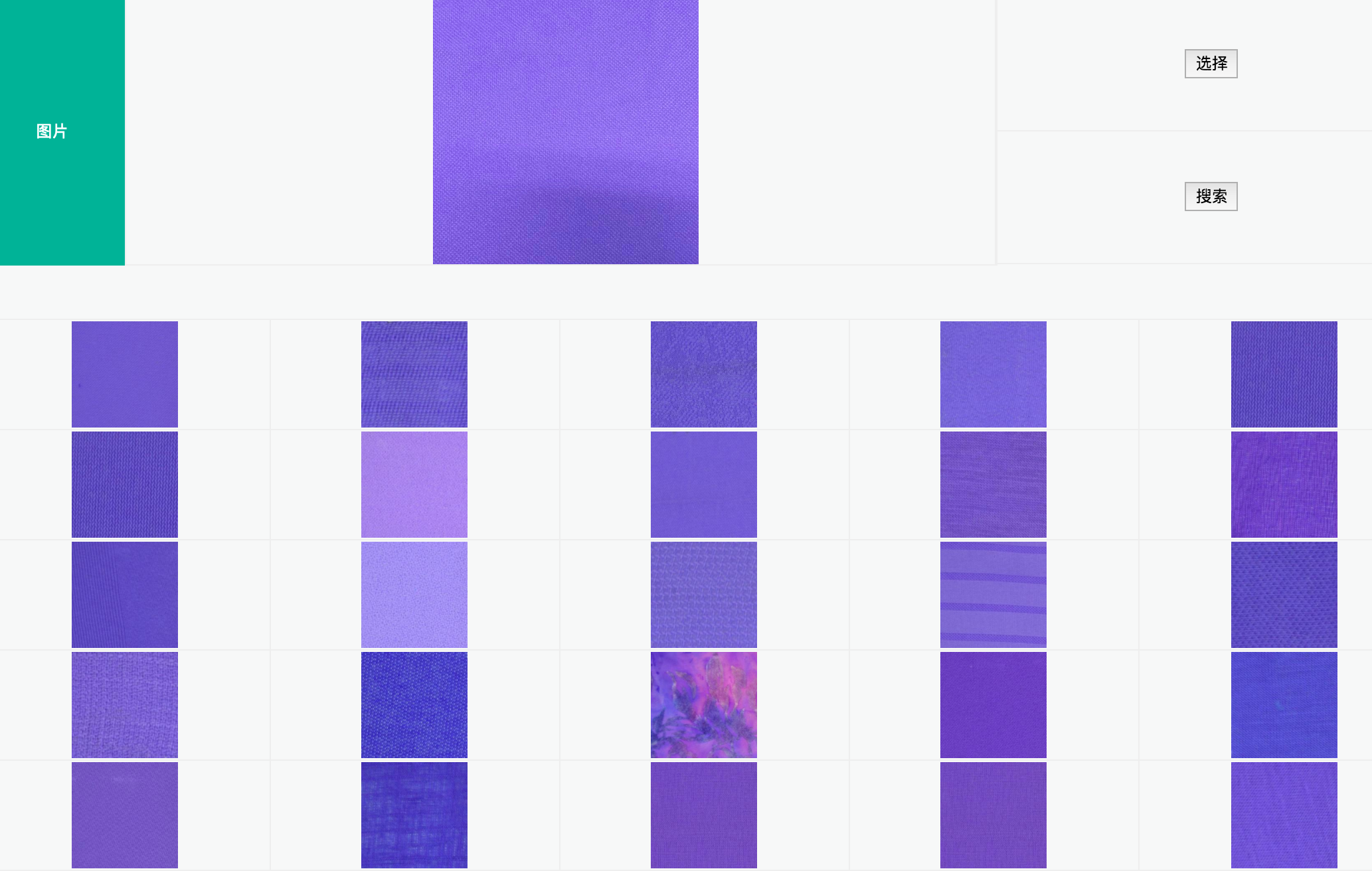
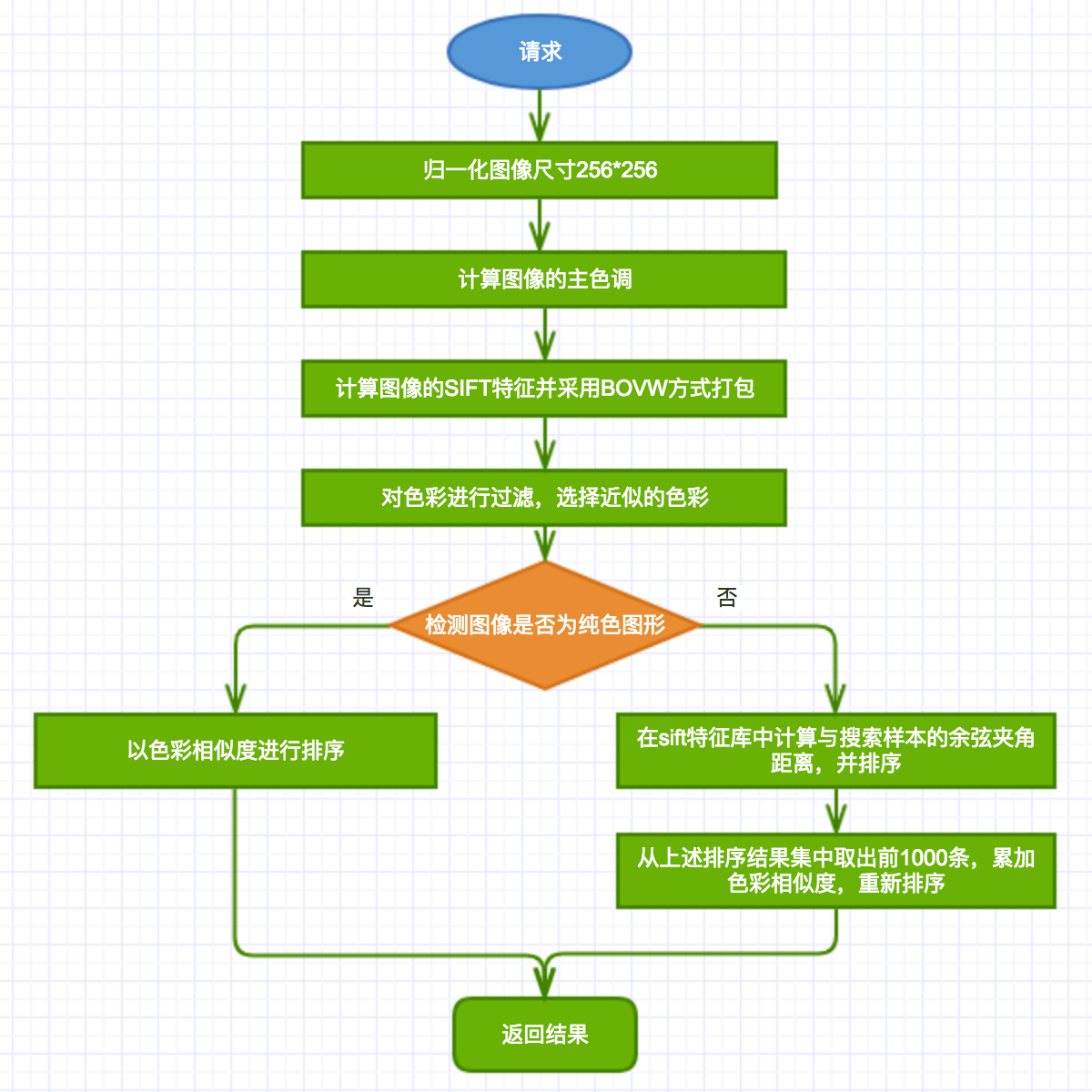
最终流程
试用于辅料